Grafología Racional y Reeducación Escritural
La postura y el equilibrio.
Oct
La postura puede definirse como la colocación de los distintos segmentos corporales en un determinado momento. El control del equilibrio forma parte sustancial de ello. También funciona como un interface entre la percepción y la acción. En este sentido, la posición y la orientación de los segmentos corporales se utilizan para calcular la posición del cuerpo en relación al mundo exterior o del mundo exterior en relación con el cuerpo. Además, la postura de algunos segmentos como: la cabeza, tronco, brazo, antebrazo, manos y dedos, al igual que la cadera, las piernas y pies. Sirven de punto de referencia para organizar los movimientos en el espacio exterior y en el espacio interior. REFERENCIAS ESPACIO-TIEMPO. Lundy (2010).
El sistema de equilibrio está dotado de referencias con el mundo exterior y con el mundo interior alternativamente. Se trata de establecer un sistema de sinergias entre estructuras, músculos y nervios. Los músculos, tanto extensores como flexores, deben de asegurar el mantenimiento de dicho equilibrio, Massion (2000).
El tono muscular depende de la integridad del cinturón miotático y del cinturón propioceptivo muscular. La distribución del tono muscular depende de una serie de reflejos cuyo objetivo es mantener la postura de referencia o adaptarla al cambio de posición de ciertos segmentos corporales. La acción–reacción trata desde el principio de estabilizar al sistema. Hablaríamos por tanto, de un sistema de creencias establecido bajo determinadas referencias espacio-tiempo, puede ser modificado cambiando pautas en la postura de estabilización comportamental, y como consecuencia modificar la conducta de una persona.
Tanto los reflejos tónicos del cuello, de las lumbares, reacciones de colocación, reacciones de soporte corporal o reflejos de enderezamiento, tienen como objetivo fundamental la organización y la adaptación al medio, a través de circuitos propioespinosos de la médula y del tronco cerebral. La reacción de colocación táctil depende de la integridad del córtex motor.
El control del equilibrio tiene que tener en cuenta:
– El valor de referencia regulada.
Se refiere a la necesidad de que exista un modelo de postura, comportamiento o de conducta eficiente y efectivo. Lacquanniti (1992) apunta a un modelo de referencia basado en la estabilidad de naturaleza geométrica. Esta geometría debe estar sustentada en los conceptos previos de la proporción áurea y lageometría sagrada, Hemenway (2008) y Rojas (2011). Y como colocar dichas geometrías en relación con el equilibrio del centro de masas del sistema corporal.
Se basa en la orientación correcta de los segmentos y el control del equilibrio. La dinámica corporal queda así estabilizada ante posibles perturbaciones externas o internas.
La geometría (estructuras genéticas 15%, personalidad de la persona) y las fuerzas externas (el sistema de conducta aprendido por medio de la educación o la sociedad 85%) llevan el control de la postura y del comportamiento de la persona. La sinergia entre ambas permitirá establecer unos valores de coherencia óptimos para mantener el equilibrio global.
Esta manifestación de las características mecánicas en características geométricas sería el resultado de un aprendizaje adquirido de la más tierna infancia, incluso ya en estado fetal en el vientre de la madre.
La regulación del equilibrio puede establecer competencias entre el equilibrio propio o el equilibrio en relación con el entorno. Mantener un vaso lleno de agua en el aire con la mano activa dos vías de control diferentes a nivel cerebral: Reacciones posturales para mantener el agua dentro del vaso pese a la acción de perturbaciones externas, o simplemente mantener el vaso en el aire con el brazo. Competencia entre el micromovimiento interno y el macromovimiento externo.
– El esquema postural corporal.
Supone una referencia interna al mismo tiempo de origen genético y otra adquirida por el aprendizaje. Se trata de una representación de las fuerzas y sobre todo de las fuerzas de apoyo y una representación de la orientación del cuerpo en relación con el equilibrio integral de la persona.
Las aferencias propioceptivas musculares proporcionan la información necesaria sobre la posición y velocidad del desplazamiento de los segmentos sobre los que se inserta el músculo. La vibración del tendón es el medio utilizado para estimular las aferencias husoriales primarias. De este modo una estimulación voluntaria de estos tendones produce una “ilusión” de movimiento en una persona con los ojos cerrados y con inmovilización de la articulación, o un movimiento de la articulación cuando ésta está libre. El resultado es que el estímulo voluntario engendrará respuesta propioceptiva a nivel inconsciente.
Así mismo, el análisis de las reacciones posturales o ilusiones del movimiento ha demostrado que existe una cadena propioceptiva cinemática que indica la posición de los segmentos los unos en relación con los otros desde los ojos hasta el suelo.
Los puntos de apoyo son los responsables de la representación de las fuerzas de apoyo. Las aferencias cutáneas y propioceptivas son fundamentales para establecer nuevos puntos de partida a la hora de orientar las nuevas direcciones a tomar o las nuevas decisiones a representar internamente. Para ello las informaciones multisensoriales obtenidas de un amplio abanico de receptores a nivel encefálico: retina, posición relativa del tronco, cabeza y extremidades. Podrían, gracias a los receptores tendinosos de Golgi, evaluar el número de unidades motrices activas en un momento dado, y por tanto calibrar exactamente el esfuerzo muscular necesario para ejecutar un movimiento coordinado y coherente.
– Los mensajes detectores de error.
Detectan la diferencia entre el valor de referencia prescrito y la postura o acción actual. Las redes de neuronas se encargarán de dar la respuesta correcta a una posible reacción postural inesperada, mediante anticipaciones posturales.
El ser humano en el esquema de referencias posturales a la hora de andar o desplazarse necesita de la activación coordinada de una serie de receptores sensoriales:
– Receptores laberínticos (información sobre aceleraciones lineales o angulares de cabeza y cuerpo.
– Receptores visuales que informan sobre los desplazamientos de la cabeza y cuerpo en el entorno.
– Receptores propioceptivos que informan de cualquier modificación de la geometría del cuerpo.
– Aferencias cutáneas plantares que informan sobre los cambios de amplitud y de la dirección de las fuerzas de apoyo contra el suelo.
La característica fundamental de los mensajes de error que intervienen en el control del equilibrio es su aspecto multisensorial. Cuando se produce una alteración o incoherencia entre las diferentes entradas sensoriales y la postura deseada, aparece la RECALIBRACIÓN de las entradas sensoriales para permitir un óptimo ajuste de los valores de estabilización.
– Los ajustamientos posturales.
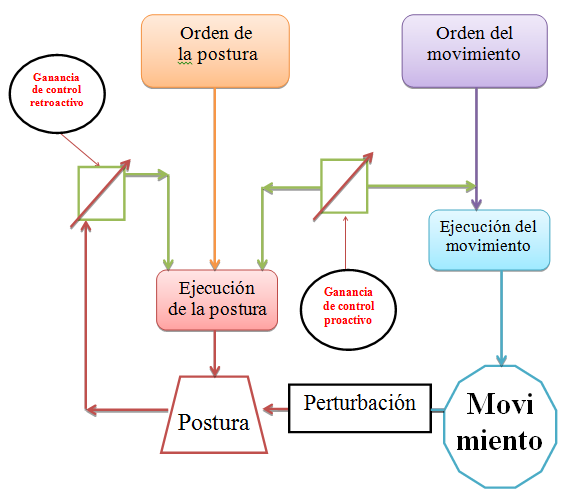
Cuando se produce una perturbación del equilibrio, existen variar “estrategias” o sinergias de control para restablecer la posición del centro de gravedad o centro de equilibrio. Entre las estrategias de control estaría: la rigidez, la rotación articular, el desplazamiento, la flexión y la extensión.
La sinergia activa es una orden muscular que pone en juego un cierto número de músculos repartidos a nivel de los distintos segmentos corporales. El establecimiento de la combinación muscular más adecuada ante una perturbación dada dependerá de las condiciones de apoyo, la intensidad de la estimulación y la eficiencia energética. Existe un mecanismo de preregulación de la reacción postural en base a la estimación y cálculo sobre la amplitud de una perturbación determinada y el ajuste necesario para su estabilización, en los enfermos de Parkinson desaparece o se reduce considerablemente.
Es muy interesante como funciona todo en conjunto. Pero como recuperar El equilibrio despues de una Operation von Protesis de cardera.
Buenas tardes. Para ayudarle necesitariamos más detalles. Puede contactar con nosotros en el whatsapp +34 655068620 Gracias